Tag: RF
Understanding the Challenge of Communicating Underwater: Underwater Acoustic Networks

In 2004 the National Oceanic and Atmospheric Administration returned to explore the remains of the RMS Titanic. They used Hercules and Argus, two remotely operated vehicles that were connected to the scientific ship by an expensive communications tether long enough to reach 2.4 miles to the sunken ship. No other communication methods exist that can give scientists the real-time video required to pilot the ROVs.
Fast communication technologies are relatively common. Modern WIFI routers allow muli-gigabit connection rates, with IEEE 802.11ac offering transfer rates of up to 6.77 Gbit/s, depending on hardware.
But communicating underwater is difficult. Water highly attenuates radio frequency (RF) signals, limiting these signals to very short distances or very low transmission speeds. Optical based communications are also limited due to high attenuation of the signal, node alignment problems, and signal obstruction by marine objects and turbidity.

Simple long-distance underwater communication has always been available. Since the dawn of sailing humans have heard mysterious underwater sounds that have turned out to be marine animals communicating with each other over long distances.
The underwater acoustic wave guide called the Deep Sound Channel (DSC) was discovered by Russian and American scientists. Sounds made at the depth of the DSC travel great distances. This was used during World War II in the creation of a long-range position fixing system called a “SOFAR bomb”, used by ships or downed pilots to secretly report their location.
Modern acoustic communications tries to take advantage of several properties of water – especially deep water. But it is restricted to very slow connection rates. It is also vulnerable to signal path reflections, Doppler spread, longer signal travel times, and quickly changing rates of signal attenuation due to water chemistry and depth. Under excellent conditions with very short signal paths, acoustic connect rates of up to 150 kbit/s are possible, but reliable connect rates of 40 kbit/s are more realistic.
An example of modern acoustic modems is the S2CM series by Evo Logics. One modem in this series has a connection rate of about 60 kbit/s with a range of 300 meters and a depth of 200 meters.
One of the bigger challenges of underwater acoustic communication is a quickly changing physical environment – especially if at least one transceiver node is in motion. Constantly changing underwater terrain, depth and water composition make it difficult for Underwater Acoustic Networks (UAN) to keep up. Lack of standardization between manufacturers also creates interoperability issues between different underwater acoustic modems.
IEEE Communications Magazine recently published a paper [1] detailing the use of software defined radio as a way of coping with the challenges of experimenting in an uncertain physical environment. According to the paper, University of Buffalo engineers are attempting to adapt Software Defined Radio (SDR) principles to underwater acoustic modems in the proposition of creating a Software Defined Acoustic Modem (SDAM) that can be easily reconfigured to allow better testing capabilities of various hardware and software underwater acoustic networks.
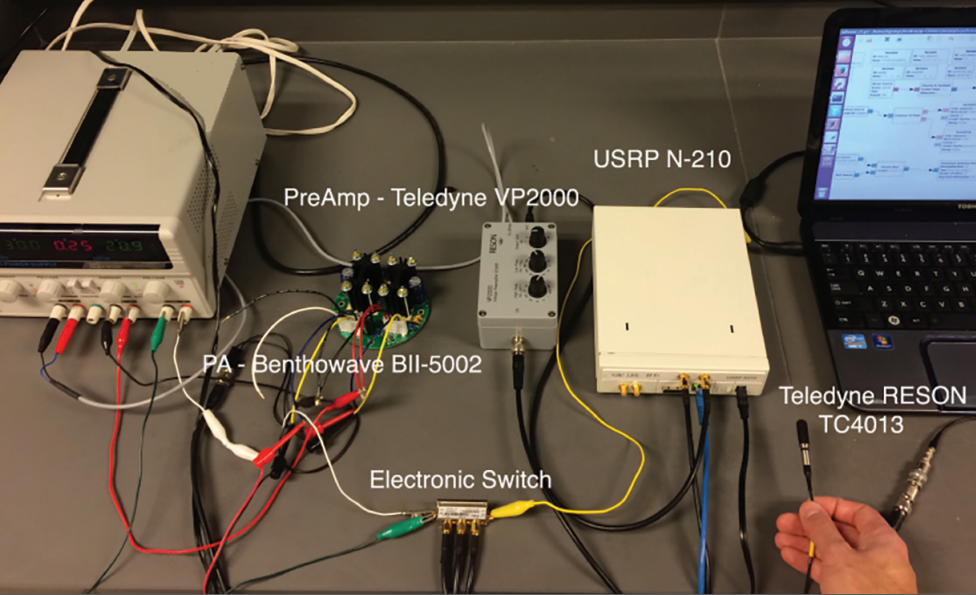
The Buffalo engineering team combined commercial off-the-shelf components and open source GNU Radio SDR software to create a highly configurable prototype SDAM that is half the cost of less agile commercially available alternatives. The SDAM prototype supports IPv4 and IPv6 Internet communications protocols.
Experiments were created by the engineering team to demonstrate the real-time adaptation capabilities of the SDAM prototype in a real-world environment and in the lab. Namely in a shallow lake, and in water tanks. Interference signals were used during these experiments and the signal-to-interference-plus-noise ratio (SINR) was measured and compared to clear channel transmissions. The adaptive transmission methods that were tested were shown to reduce the bit error rate during the transmission, as compared to more standard fixed transmission rates.
While this paper did not demonstrate a dramatic improvement of underwater data transmission speeds, it did demonstrate a way of creating a Software Defined Acoustic Modem that is less expensive and vastly more configurable than commercial models. This prototype is an excellent jumping-off platform for the further development of inexpensive SDAM based communications, which should allow other engineers to experiment with other adaptive underwater transmissions, and even with multi-path networks.
And this is where this paper becomes important. Software defined radio has caught fire in the engineering and hobbyist community, and is making great strides because of this. By piggybacking off of SDR, SDAM is making experimental underwater acoustic communication available to a wide audience.
[1] Demirors, E.; Sklivanitis, G.; Melodia, T.; Batalama, S.N.; Pados, D.A., “Software-defined underwater acoustic networks: toward a high-rate real-time reconfigurable modem,” in Communications Magazine, IEEE , vol.53, no.11, pp.64-71, November 2015
doi: 10.1109/MCOM.2015.7321973
URL: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=7321973&isnumber=7321957
